Visual Hexapod Controller 32.1.0 |
|
|
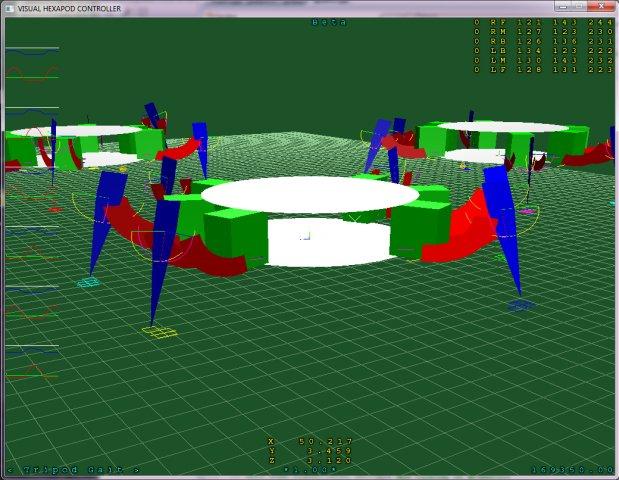
This project's aim is to build a 3D simulation environment to control a hexapod, and communicate serially to said hexapod when connected. This way new motion algorithms can be perfected without damaging your robot.
|